Getting Start with MetaUrban
Tryout MetaUrban with one line
We provide a script to let you try out MetaUrban by keyboard immediately after installation! Please run:
# Make sure current folder does not have a sub-folder named metaurban
python -m metaurban.examples.drive_in_static_env
Press T in the main window will kick-off this. You can also press H to visit the helper information on other shortcuts.
We also provide a script to let you experience an “auto-drive” journey carried out by our pre-trained RL agent. Please run:
python -m metaurban.examples.drive_with_pretrained_policy
Besides, you can verify the efficiency of MetaUrban via running:
python -m metaurban.tests.test_env.profile_metaurban
MetaUrban provides 2 sets of RL environments: the static environments and the dynamic environments. We provide the examples for those suites as follow:
# Make sure current folder does not have a sub-folder named metaurban
# ===== Environments with only Static Objects =====
python -m metaurban.examples.drive_in_static_env
You will see scenarios like these:

# ===== Environments with Static Objects, Vehicles, Pedestrians and Robots =====
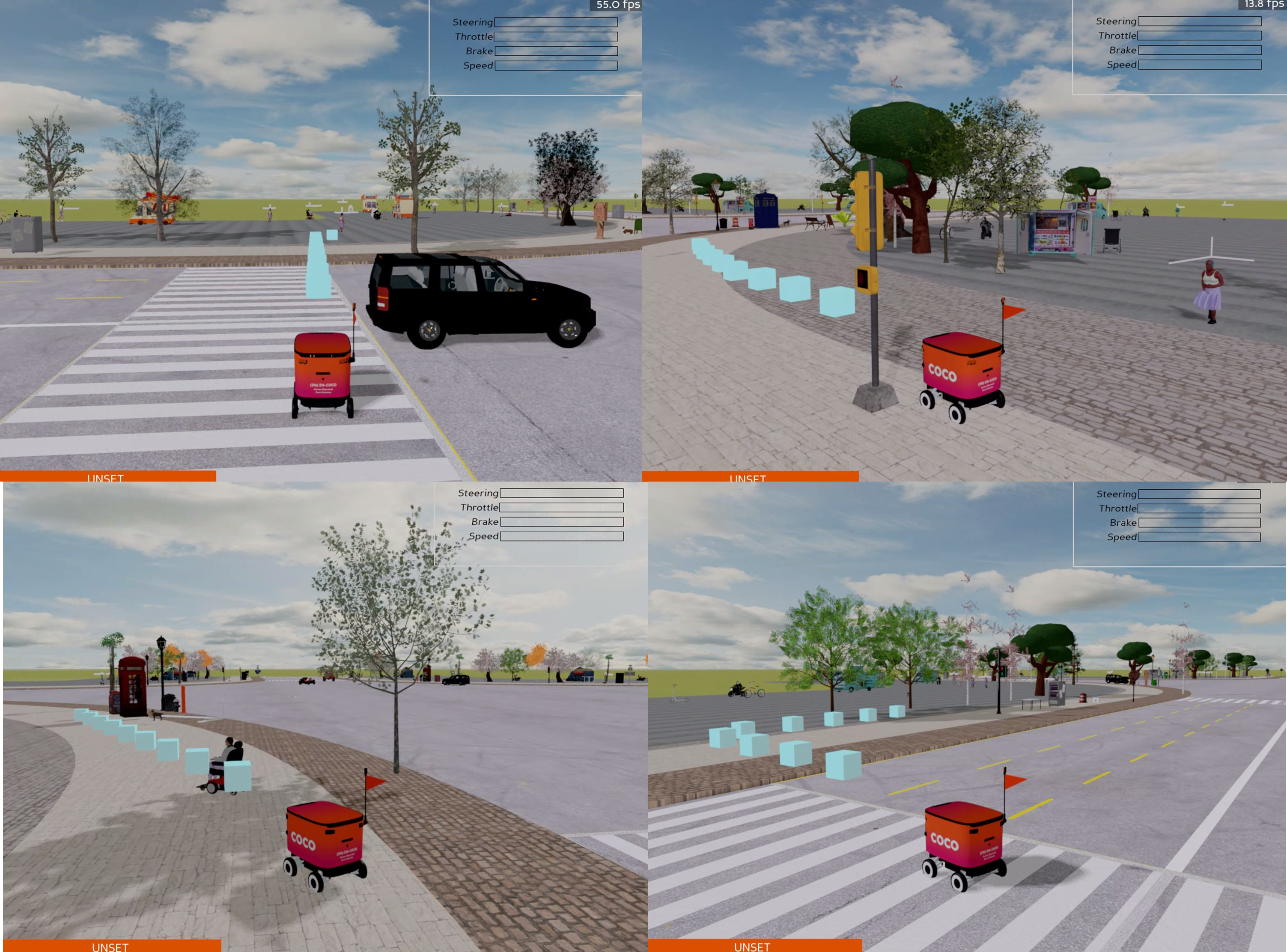
python -m metaurban.examples.drive_in_dynamic_env
You will see scenarios like these:
Using MetaUrban in Your Code
The usage of MetaUrban is as same as other gym environments. Almost all decision making algorithms are compatible with MetaUrban, as long as they are compatible with OpenAI gym. The following scripts is a minimal example for instantiating a MetaUrban environment instance.
from metaurban.envs import SidewalkStaticMetaUrbanEnv
import gymnasium as gym
env = SidewalkStaticMetaUrbanEnv(dict(use_render=True, num_scenarios=1000, start_seed=1010, object_density=0.05))
obs, info = env.reset()
for i in range(1000):
obs, reward, terminated, truncated, info = env.step(env.action_space.sample())
if terminated or truncated:
env.reset()
env.close()
Note
Please note that each process should only have one single MetaUrban instance due to the limit of the underlying simulation engine. Thus the parallelization of training environment should be in process-level instead of thread-level.